In 2018, Cyprus Subsea was actively involved in the “Unmanned ocean vehicles, a flexible and cost-efficient offshore monitoring and data management approach—GLIDER” Project. The aim of this project was to test whether gliders equipped with novel sensors could effectively perform ecosystem surveys by recording physical, biogeochemical, and biological data simultaneously.
Autonomous subsurface and surface vehicles, collectively referred to as “gliders”, are part of such an ocean observing systems providing high spatiotemporal resolution. In particular, the GLIDER Project deployed three autonomous surface and underwater vehicles along the Lofoten–Vesterålen (LoVe) shelf-slope-oceanic system in Arctic Norway.
During a period of high biological activity in the area, these gliders recorded a set of environmental parameters, including temperature, salinity, and oxygen, map the spatiotemporal distribution of zooplankton, and record cetacean vocalizations and anthropogenic noise. A subset of these parameters was effectively employed in near-real-time data assimilative ocean circulation models, improving their local predictive skills.
Cyprus Subsea piloted a Seaglider® from March to September 2018 alongside two other autonomous vehicles piloted by Maritime Robotics (Wave Glider) and Offshore Sensing (Sailbuoy). Initial deployment of the vehicles occurred from the R/V Håkon Mosby, offshore Bodø, Norway.
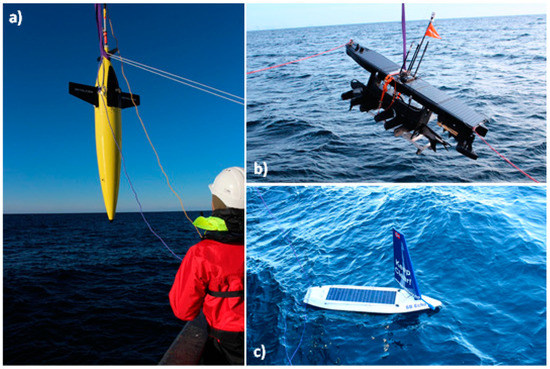
(a) Seaglider® (Huntington Ingalls Industries; formerly Kongsberg Maritime)
(b) Wave Glider SV3 (Liquid Robotics)
(c) Sailbuoy (Offshore Sensing)
Important & Complementary Role of Gliders
Some of the results achieved through this project were recently published by MDPI, a pioneer in scholarly open access publishing. Titled “Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic—The Glider Project“, the peer-reviewed article was published in MDPI’s journal, Sensors, on 12 October 2021.
Dr. Daniel Hayes, the Managing Director of Cyprus Subsea, is one of the co-authors of the article. The results of their work showed the importance and complementary role of gliders in increasing the accuracy of the ocean circulation models.
Improved Ocean Modeling
By assimilating a few sporadic glider observations, the performance of their ocean model greatly improved. A systematic glider-based observing system can be an important complement to better constrain small-scale circulation features. Additionally, our experiments demonstrated that high-resolution observations combined with an eddy-resolving multi-scale model could improve simulation skills towards capturing multiscale flow dynamics, which is fundamental in the understanding of mass and energy transport mechanisms in the oceanic environment.
The GLIDER project demonstrated that a suite of autonomous vehicles can collect physical oceanographic parameters alongside biological data across multiple ecosystem components in the coastal Arctic. The productive waters of the LoVe region are shared by ecological important low (phytoplankton and zooplankton) and high (marine mammals) trophic groups and an increasing number of human stakeholders. High spatial and temporal resolution data collected with a small environmental footprint and made available by the GLIDER data management platform make it possible to capture ecosystem dynamics, important towards the realization of an ecosystem-based management approach in the region and elsewhere. The integration between the current underwater observatory system in LoVe and gliders should be prioritized to form an ecosystem observatory module network able to provide unique marine research and monitoring capabilities.
MDPI Sensors 2021:
Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic—The Glider Project
Autonomous gliders can be effective long-term, remote, noninvasive ecosystem monitoring and research platforms capable of operating in high-latitude marine ecosystems. These platforms can record high-quality baseline environmental data in areas where extractive activities are planned and provide much-needed information for operational and management purposes.
In summary, the GLIDER Project demonstrated that effective ocean management requires integrated and sustainable ocean observing systems enabling stakeholders to map and understand ecosystem properties and the effects of human activities.
Full open access article: https://www.mdpi.com/1424-8220/21/20/6752/htm#
Co-Authors & Affiliations
Lionel Camus 1,*, Hector Andrade 2, Ana Sofia Aniceto 3, Magnus Aune 1, Kanchana Bandara 4, Sünnje Linnéa Basedow 5, Kai Håkon Christensen 6, Jeremy Cook 7, Malin Daase 5, Katherine Dunlop 2, Stig Falk-Petersen 1, Peer Fietzek 8, Gro Fonnes 7, Peygham Ghaffari 1, Geir Gramvik 9, Inger Graves 10, Daniel Hayes 11, Tor Langeland 7, Harald Lura 12, Trond Kristiansen Marin 13, Ole Anders Nøst 1, David Peddie 14, Joel Pederick 15, Geir Pedersen 7, Ann Kristin Sperrevik 6, Kai Sørensen 13, Luca Tassara 1, Sigurd Tjøstheim 9, Vigdis Tverberg 4 and Salve Dahle 1
- Akvaplan-niva AS, 9007 Tromsø, Norway
- Institute of Marine Research, 9007 Tromsø, Norway
- The Norwegian College of Fishery Science, Faculty of Fisheries and Bioeconomics, UiT—The Arctic University of Norway, 9037 Tromsø, Norway
- Faculty for Bioscience and Aquaculture, Nord University, 8026 Bodø, Norway
- Department of Arctic and Marine Biology, Faculty of Fisheries and Bioeconomics, UiT—The Arctic University of Norway, 9037 Tromsø, Norway
- R&D Department, Norwegian Meteorological Institute, 0371 Oslo, Norway
- NORCE Norwegian Research Center, 5008 Bergen, Norway
- Kongsberg Maritime Germany GmbH, 22529 Hamburg, Germany
- Kongsberg Digital, 3616 Kongsberg, Norway
- Aanderaa Xylem, 5225 Nesttun, Norway
- Cyprus Subsea Consulting & Services, 2326 Nicosia, Cyprus
- ConocoPhillips Skandinavia AS, 4056 Tananger, Norway
- Marin Biogeochemistry and Oceanography, NIVA, 0579 Oslo, Norway
- Offshore Sensing AS, 5072 Bergen, Norway
- Maritime Robotics AS, 7010 Trondheim, Norway